 平台热线
平台热线



节卡机器人:人机协作机器人具备友好性、感知能力
友好性
人机协作机器人具备的友好性是指设计人员在设计时,需要保证机器人的表面和关节必须是光滑且平整的,不能带有尖锐的转角或者易夹伤操作人员的缝隙。
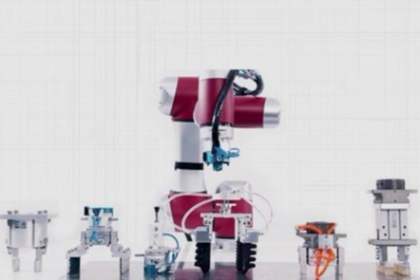
感知能力
人机协作机器人应该能够感知周围的环境,并根据环境的变化改变自身的行为。比如,当机器人手臂撞击到人类手臂时,人机协作机器人可根据力觉传感器感知到人类手臂的存在,并及时做出停止、远离或其他保护人类安全的动作。节卡机器人

人机协作由来已久
实际上,人机协作技术很早以前就已经成为全球各大高校、机器人研究所争相攻关的机器人技术。但是,在上世纪90年代之前,还尚未有成熟的产品进行商业化量产。节卡机器人
美国在人机协作方面的研究起步较早,世界上**台商业化人机协作机器人便诞生于美国Barrett Technology公司。Barrett Technology创立于1990年,从麻省理工培训(MIT)中孵化而出,而其任务就是设计研发设计世界上**台触觉机器人手臂,而Barrett Technology也获得了美国能源部(DoE)、美国国家航空航天局(NASA)、美国国家卫生基金会(NSF)的大力支持。
更多信息请咨询:节卡机器人